Image extracted from: Creating a Gradient Descent Animation in Python
Gradient descent is one of the most fundamental optimization algorithms in machine learning. It's a method for finding the minimum of a function by iteratively moving in the direction of steepest descent.
The Intuition
Imagine you're standing on a mountain in thick fog, and you want to reach the valley below. You can't see far, but you can feel the slope beneath your feet. Gradient descent works the same way: it takes small steps downhill, following the steepest path, until it reaches a minimum.
The Mathematics
The Basic Formula
At its core, gradient descent updates parameters using this simple formula:
Where:
- represents the parameters we're optimizing
- is the learning rate (step size)
- is the gradient of the cost function with respect to
Understanding the Gradient: From Simple to Complex
Let's demystify the gradient symbol (called "nabla" or "del") by building up from the simplest case.
Case 1: Single Variable (One Parameter)
When we have just one parameter, the gradient is simply the derivative:
The derivative tells us: "If I increase by a tiny amount, how much does change?"
Example: For :
- If , then → function is increasing, go left (decrease )
- If , then → function is decreasing, go right (increase )
- If , then → we're at the minimum!
Case 2: Two Variables (Two Parameters)
When we have two parameters and , the gradient becomes a vector with two components:
Each partial derivative asks: "If I change only (keeping others fixed), how much does change?"
Example: For :
At point :
This vector points in the direction of steepest ascent. We go in the opposite direction (subtract it) to descend!
Case 3: Many Variables (General Case)
For n parameters , the gradient is an n-dimensional vector:
Each component tells us how sensitive is to changes in that specific parameter. This is exactly what we need to know which direction to adjust each parameter!
Key Insight: Whether you have 1 parameter or 1 million parameters, the idea is the same: compute how much each parameter affects the cost, then adjust them in the opposite direction.
Walking Through a Complete Example
Let's see gradient descent in action with the simplest case: one variable.
Consider minimizing the quadratic function:
The gradient (derivative) is:
The gradient descent update rule becomes:
Starting at with learning rate :
Iteration 1:
The gradient was positive (10 slope upward), so we moved left (decreased )
Iteration 2:
Still positive gradient, getting smaller, so smaller steps
Iteration 3:
Pattern continues: as we approach the minimum, the gradient shrinks, so our steps get smaller automatically!
With each step, we get closer to the minimum at . Notice how the steps naturally get smaller as the gradient decreases near the minimum.
Key Concepts
Learning Rate
The learning rate is crucial:
- Too large: We might overshoot the minimum or even diverge
- Too small: Convergence will be very slow
- Just right: Efficient convergence to the minimum
Let's do experiments with different learning rates and see how it affects convergence!
Controls
Statistics
Quick Presets
Function & Gradient Descent Path
Loss Over Iterations
About Learning Rate
Too Low (< 0.05)
Convergence is very slow. The algorithm takes many iterations to reach the minimum, but the path is stable.
Optimal (0.05 - 0.3)
Good balance between speed and stability. Converges efficiently without overshooting the minimum.
Too High (> 0.5)
May overshoot the minimum or diverge. The algorithm becomes unstable and might not converge at all.
Types of Gradient Descent
1. Batch Gradient Descent
Uses the entire dataset to compute the gradient:
Where is computed over all training examples.
2. Stochastic Gradient Descent (SGD)
Updates parameters using one training example at a time:
3. Mini-batch Gradient Descent
A compromise: uses a small batch of examples:
Where is the batch size.
Convergence
Gradient descent converges when the gradient becomes very small:
Where is a small threshold value.
Challenges
- Local Minima: The algorithm might get stuck in local minima instead of finding the global minimum
- Saddle Points: Points where the gradient is zero but aren't minima
- Plateau Regions: Areas where the gradient is very small, slowing down learning
Real-World Applications
Gradient descent is used to train:
- Neural Networks: Optimizing millions of parameters
- Linear Regression: Finding the best-fit line
- Logistic Regression: Classification problems
- Support Vector Machines: Finding optimal hyperplanes
Gradient Descent in Deep Learning
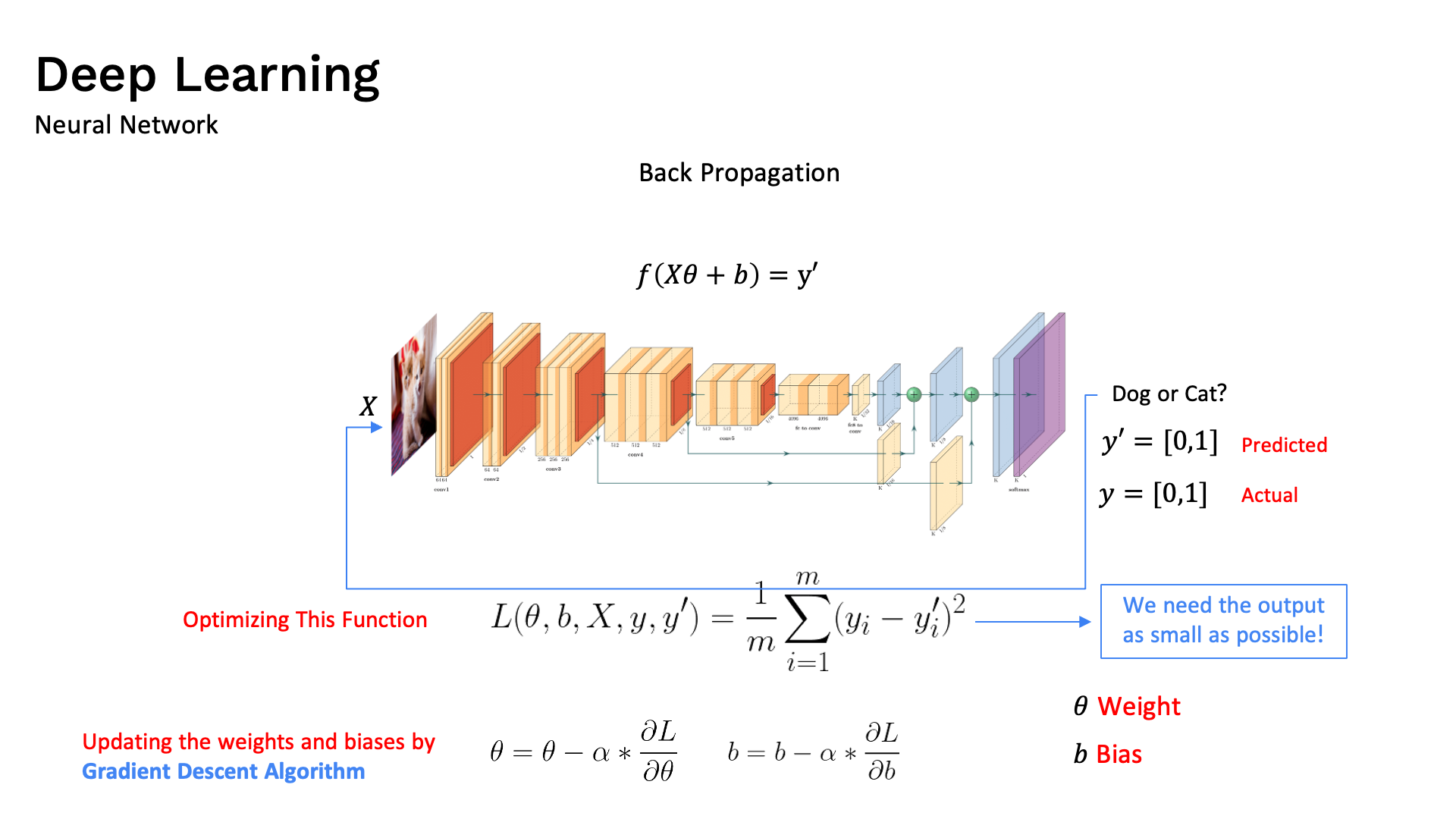
A deep neural network uses gradient descent to train weights across all its layers by minimizing the cost function.
The image above shows a Deep Neural Network — a powerful type of model that directly relies on gradient descent to optimize its cost function.
In deep learning:
- Input Layer receives raw data (e.g. image pixels, words, numbers)
- Hidden Layers perform feature extraction — learning complex patterns from data
- Output Layer produces the final prediction
- Weights in each connection are the parameters that gradient descent optimizes
During training, the process is:
A network may have millions of neurons → millions of weights → a gradient vector with millions of dimensions — yet gradient descent works exactly the same way as in the 1D case: move opposite to the gradient to reduce the loss!
Python Implementation
Below is a pure-Python implementation — no ML libraries. Each block maps directly to the math above. Highlighted lines are the core formulas.
Step 1 — Cost Function and its Gradient
# J(θ) = θ² → the function we want to minimize
def cost(theta):
return theta ** 2
# ∇J(θ) = dJ/dθ = 2θ → its derivative (gradient)
def gradient(theta):
return 2 * theta
Step 2 — The Update Rule
def update(theta, alpha):
grad = gradient(theta) # ① compute ∇J(θ)
return theta - alpha * grad # ② apply θ_new = θ_old − α·∇J(θ)
Line 3 is the update rule formula above, written directly as Python.
Step 3 — Full Loop Until Convergence
Run updates until — when the gradient is essentially zero:
def gradient_descent(theta_init, alpha, epsilon=1e-6, max_iters=1000):
theta = theta_init # θ₀ — starting point
for i in range(max_iters):
grad = gradient(theta) # ∇J(θ) = 2θ
if abs(grad) < epsilon: # stop when |∇J(θ)| < ε
print(f"Converged at iteration {i}")
break
theta = theta - alpha * grad # θ_new = θ_old − α·∇J(θ)
if i < 5:
print(f" iter {i+1:2d}: θ={theta:.5f} J={cost(theta):.5f} ∇J={grad:.5f}")
return theta
# Same starting values as the manual example above: θ₀ = 10, α = 0.1
theta_min = gradient_descent(theta_init=10.0, alpha=0.1)
print(f"\nMinimum at θ = {theta_min:.8f}")
Output — matches the manual iterations above:
iter 1: θ= 8.00000 J=64.00000 ∇J=20.00000
iter 2: θ= 6.40000 J=40.96000 ∇J=16.00000
iter 3: θ= 5.12000 J=26.21440 ∇J=12.80000
iter 4: θ= 4.09600 J=16.77722 ∇J=10.24000
iter 5: θ= 3.27680 J=10.73742 ∇J= 8.19200
Minimum at θ = 0.00000001
Step 4 — Linear Regression: Two Parameters
For a model , the cost is mean squared error:
With partial derivatives:
import numpy as np
def linear_regression_gd(X, y, alpha=0.01, epochs=500):
m = len(y)
w, b = 0.0, 0.0 # θ = [w, b] — initialize to zero
for epoch in range(epochs):
y_pred = w * X + b # forward pass: ŷ = w·X + b
error = y_pred - y # residuals: ŷ − y
dw = (2 / m) * np.dot(error, X) # ∂J/∂w = (2/m) Σ (ŷ−y)·x
db = (2 / m) * np.sum(error) # ∂J/∂b = (2/m) Σ (ŷ−y)
w = w - alpha * dw # w_new = w_old − α·∂J/∂w
b = b - alpha * db # b_new = b_old − α·∂J/∂b
if epoch % 100 == 0:
loss = np.mean(error ** 2) # J(w,b) = (1/m) Σ (ŷ−y)²
print(f"Epoch {epoch:4d}: loss={loss:.4f} w={w:.4f} b={b:.4f}")
return w, b
# True relationship: y = 2·x → model should converge to w≈2, b≈0
X = np.array([1.0, 2.0, 3.0, 4.0, 5.0])
y = np.array([2.0, 4.0, 6.0, 8.0, 10.0])
w, b = linear_regression_gd(X, y)
print(f"\nFitted: ŷ = {w:.4f}·x + {b:.4f}")
The highlighted lines 7–12 map directly to the formulas:
- Lines 7–8: forward pass and residuals
- Lines 9–10: partial derivatives and
- Lines 11–12: gradient descent update rule
Next Steps
Once you understand gradient descent, you can explore advanced variations:
- Momentum: Adds velocity to updates
- Adam: Adaptive learning rates per parameter
- RMSprop: Handles sparse gradients better